Xin Zhou
I am a post-doctoral researcher at the HKUST UAV Group led by Assoc. Prof. Shaojie Shen. I received my Ph.D. degree from the FAST Lab at Zhejiang University, China, where I focused on aerial robots, autonomous navigation, and swarm robotics. My doctoral advisors were Assoc. Prof. Fei Gao and Prof. Chao Xu. My research vision is to enable aerial robots to fly as freely and naturally as a flock of birds.
Email: [email protected], [email protected] | Google Scholar | ResearchGate | LinkedIn
Publications
Journal Papers:
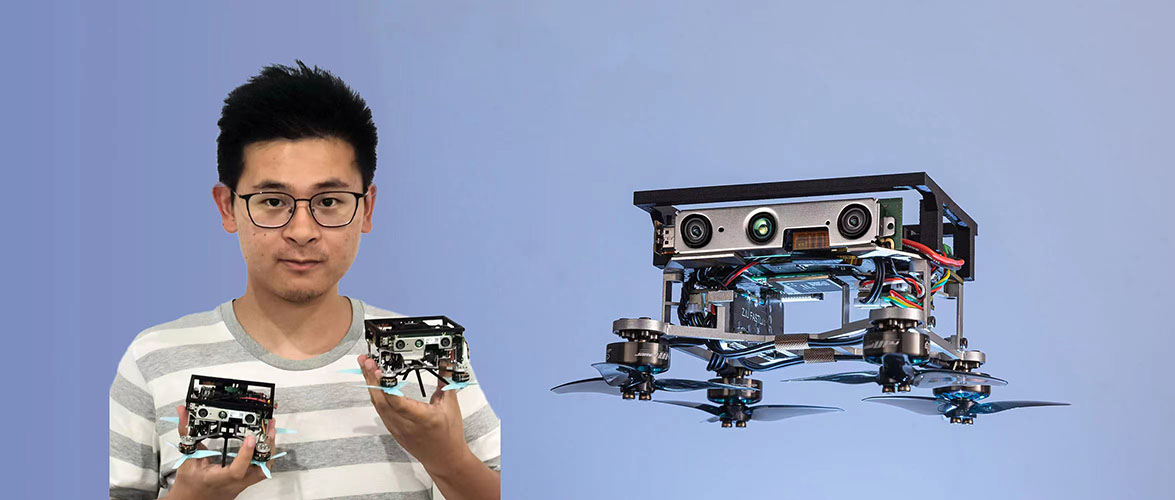
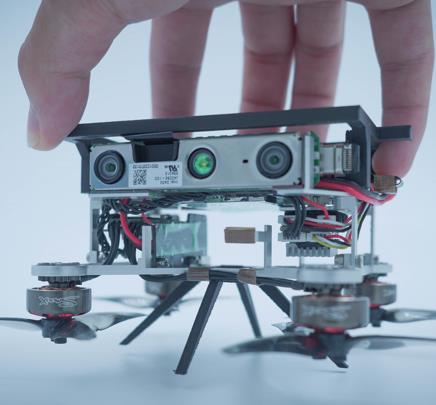
- Swarm of micro flying robots in the wild
Xin Zhou, Xiangyong Wen, Zhepei Wang, Yuman Gao, Haojia Li, Qianhao Wang, Tiankai Yang, Haojian Lu, Yanjun Cao, Chao Xu, Fei Gao
Science Robotics (Cover Paper) | paper link | code | videos: YouTube, bilibili

- EGO-Planner: An esdf-free gradient-based local planner for quadrotors
Xin Zhou, Zhepei Wang, Hongkai Ye, Chao Xu, Fei Gao
IEEE Robotics and Automation Letters | paper link | pdf | code | videos: YouTube, bilibili

- Primitive-Swarm: An Ultra-Lightweight and Scalable Planner for Large-Scale Aerial Swarms
Hou, Jialiang*, Xin Zhou*, Neng Pan, Ang Li, Yuxiang Guan, Chao Xu, Zhongxue Gan, and Fei Gao (* Equal Contribution)
IEEE Transactions on Robotics | paper link | pdf | code
- Geometrically constrained trajectory optimization for multicopters
Zhepei Wang, Xin Zhou, Chao Xu, Fei Gao
IEEE Transactions on Robotics | paper link | code | videos 1: YouTube, bilibili; videos 2: YouTube, bilibili - Teach-Repeat-Replan: A complete and robust system for aggressive flight in complex
environments
Fei Gao, Luqi Wang, Boyu Zhou, Xin Zhou, Jie Pan, Shaojie Shen
IEEE Transactions on Robotics | paper link | code | videos: YouTube, bilibili - Robust and efficient trajectory planning for formation flight in dense environments
Lun Quan, Longji Yin, Tingrui Zhang, Mingyang Wang, Ruilin Wang, Sheng Zhong, Xin Zhou, Yanjun Cao, Chao Xu, Fei Gao
IEEE Transactions on Robotics | paper link | code | videos: YouTube, bilibili - Alternating minimization based trajectory generation for quadrotor aggressive flight
Zhepei Wang, Xin Zhou, Chao Xu, Jian Chu, Fei Gao
IEEE Robotics and Automation Letters | paper link | code | videos: YouTube, bilibili - TGK-Planner: An efficient topology guided kinodynamic planner for autonomous quadrotors
Hongkai Ye, Xin Zhou, Zhepei Wang, Chao Xu, Jian Chu, Fei Gao
IEEE Robotics and Automation Letters | paper link | code | videos: YouTube, bilibili - Enhanced decentralized autonomous aerial robot teams with group planning
Jialiang Hou, Xin Zhou, Zhongxue Gan, Fei Gao
IEEE Robotics and Automation Letters | paper link | code | videos: YouTube, bilibili - Unmanned aerial vehicle‐mediated drug delivery for first aid
Tao Sheng, Rui Jin, Changwei Yang, Ke Qiu, Mingyang Wang, Jiaqi Shi, Jingyu Zhang, Yuman Gao, Qing Wu, Xin Zhou, Hao Wang, Juan Zhang, Qin Fang, Neng Pan, Yanan Xue, Yue Wang, Rong Xiong, Fei Gao, Yuqi Zhang, Haojian Lu, Jicheng Yu, Zhen Gu
Advanced Materials | paper link - Fact: Fast and active coordinate initialization for vision-based drone swarms
Yuan Li, Anke Zhao, Yingjian Wang*, Ziyi Xu, Xin Zhou*, Chao Xu, Jinni Zhou, Fei Gao* (*Corresponding authors)
IEEE Robotics and Automation Letters | paper link
Conference Papers:
- EGO-Swarm: A fully autonomous and decentralized quadrotor swarm system in cluttered
environments
Xin Zhou, Jiangchao Zhu, Hongyu Zhou, Chao Xu, Fei Gao
International Conference on Robotics and Automation (ICRA) | paper link | code | videos: YouTube, bilibili
- Automatic parameter adaptation for quadrotor trajectory planning
Xin Zhou, Chao Xu, Fei Gao
International Conference on Intelligent Robots and Systems (IROS) | paper link | code | videos: bilibili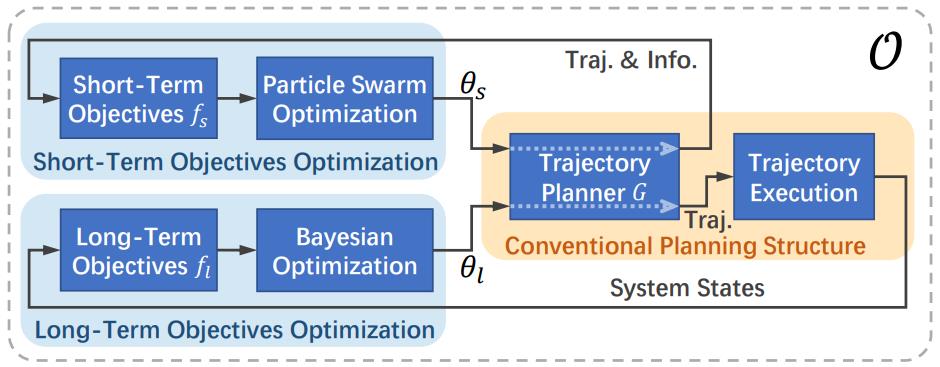
- CMPCC: Corridor-based model predictive contouring control for aggressive drone flight
Jialin Ji*, Xin Zhou*, Chao Xu, Fei Gao (*Equal Contribution)
International Symposium on Experimental Robotics (ISER) | paper link | code | videos: YouTube, bilibili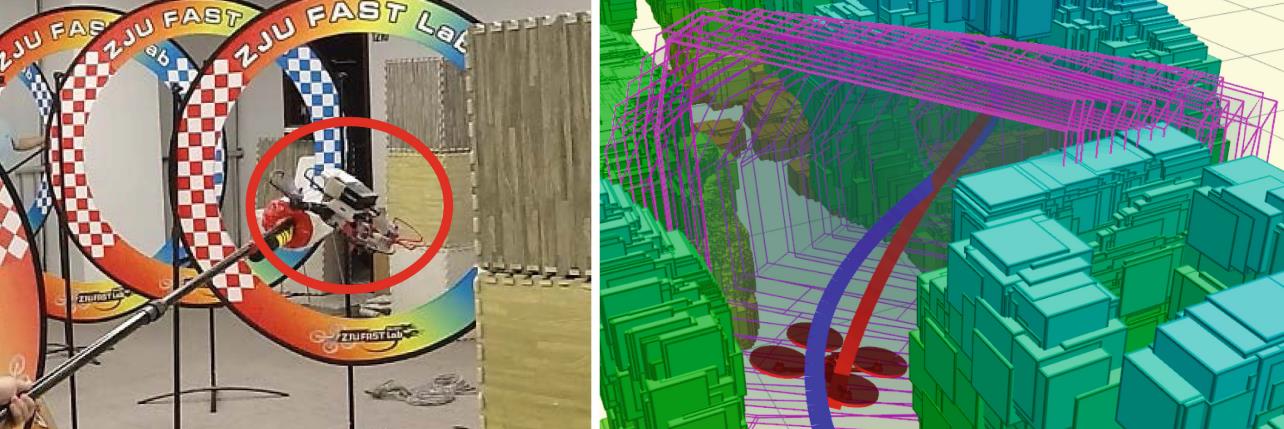
- Preserving Relative Localization of FoV-Limited Drone Swarm via Active Mutual Observation
Lianjie Guo, Zaitian Gongye, Ziyi Xu, Yingjian Wang, Xin Zhou*, Jinni Zhou, and Fei Gao* (*Corresponding authors)
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Open-Source Code

EGO-Planner
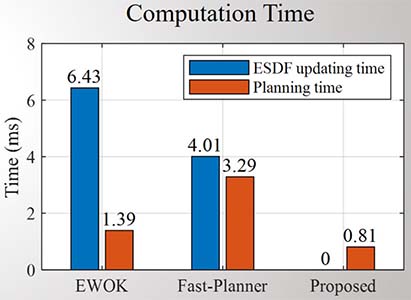
 Initially released in 2020, EGO-Planner is a lightweight, highly-optimized, robust, gradient-based local planner, which significantly reduces computation time compared to some state-of-the-art methods. The total planning time is only around 1ms without ESDF construction.
Initially released in 2020, EGO-Planner is a lightweight, highly-optimized, robust, gradient-based local planner, which significantly reduces computation time compared to some state-of-the-art methods. The total planning time is only around 1ms without ESDF construction.
EGO-Swarm

EGO-Planner-v2



Awards
Services